Sanidad en Valladolid
Así funciona el robot Mako con el que operan traumatólogos del Hospital ClínicoSecciones
Servicios
Destacamos
Sanidad en Valladolid
Así funciona el robot Mako con el que operan traumatólogos del Hospital ClínicoEn el Hospital Clínico Universitario de Valladolid desembalaron el robot Mako en diciembre de 2022. Es un brazo robotizado con el que los cirujanos ortopédicos han implantado desde ese momento un millar largo de prótesis de cadera y de rodilla. Es una tecnología que permite una planificación tridimensional, lo que mejora la precisión en quirófano, con un análisis inteligente de los datos de cada paciente. La compra supuso a la Gerencia Regional de Salud de la Junta de Castilla y León, al Sacyl, un desembolso de 1.094.130 euros.

La cirugía de rodilla
y cadera asistida
por un brazo robótico
Esta técnica lleva realizándose con éxito en el Hospital Clínico Universitario de Valladolid desde hace dos años.
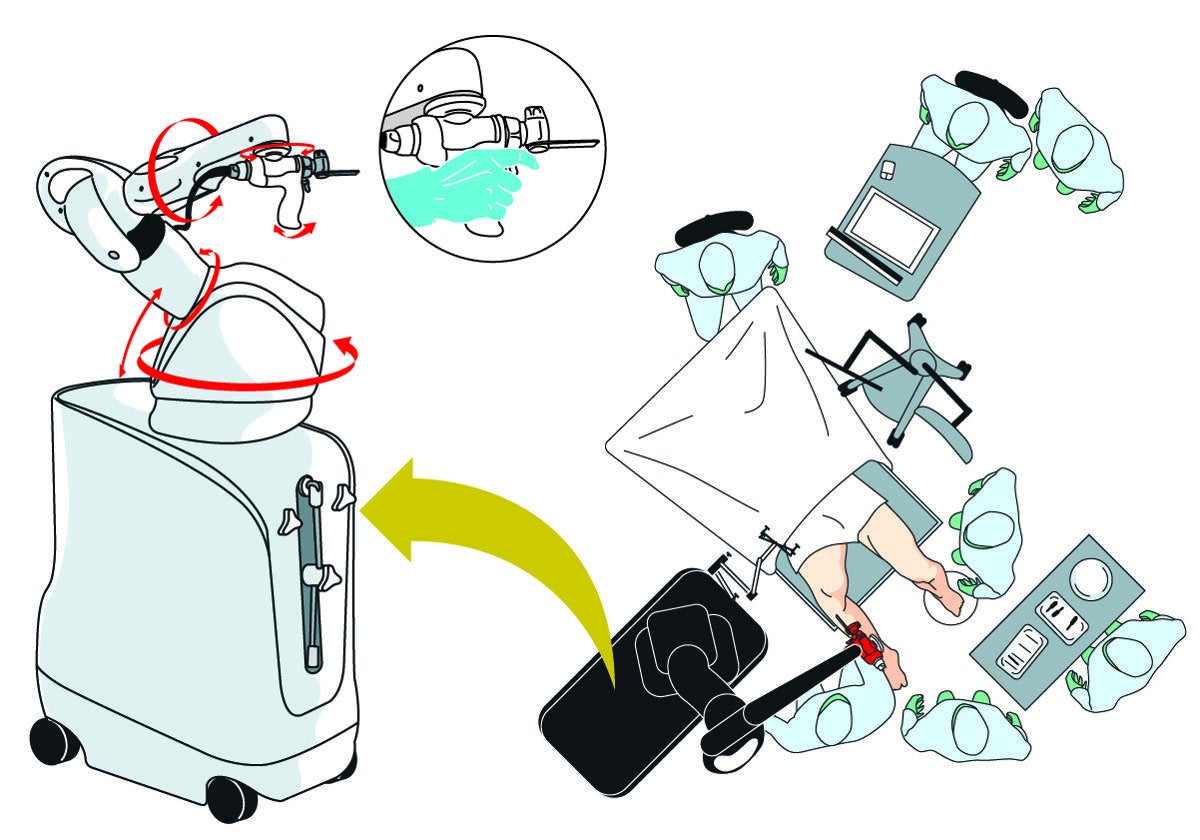
El brazo robótico es una ayuda al cirujano que es quien realiza la intervención y toma decisiones antes y durante la operación.
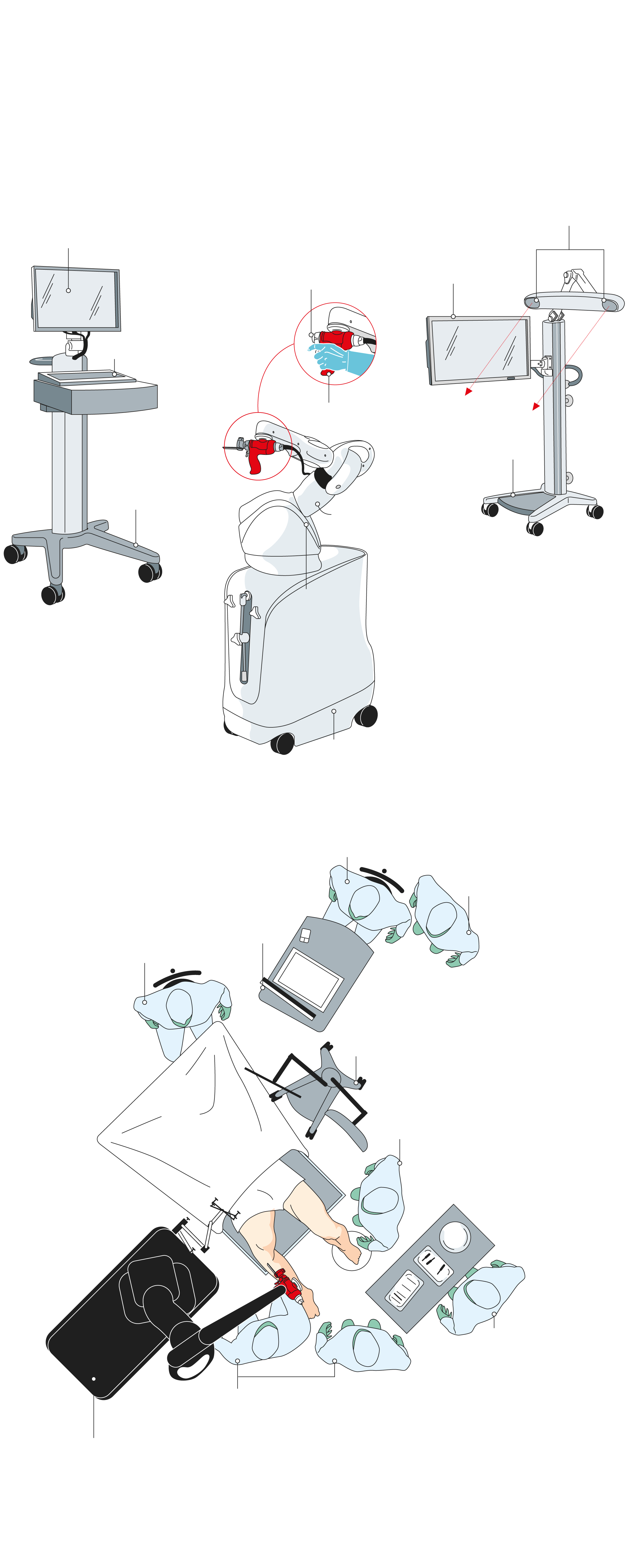
El sistema está compuesto por tres módulos:
El brazo robótico
Permite controlar las manipulaciones, cortes e incisiones desde el mando ergonómico. La pistola del brazo interpreta los movimientos del cirujano y reduce al mínimo vibraciones.
La exactitud de las operaciones son submilimétricas.
Cabezal
para acoplar
los diferentes
utensilios para
realizar la operación
Pistola de
intervención
Brazo
articulado
Las articulaciones
del brazo hacen
que sea posible
llegar a todos
los lugares
que necesite
el cirujano
Base
del robot
con un freno
de pedal
Pie de cámara
Realiza un seguimiento de la posición de las herramientas de ayuda al cirujano. Avisa de movimientos no deseados en el miembro que está siendo intervenido.
Cámaras
de vídeo
Monitor para
el cirujano
que muestra
las imágenes
y está sincronizado
con el brazo
robótico
Pie móvil
Módulo de guiado
Es una estación de trabajo y coordina la recepción de la información de los diversos componentes. Este módulo lo controla un ingeniero.
Este monitor muestra
las imágenes
y está sincronizado
con el brazo
robótico
Consola de
control
Pie móvil
En el quirófano
El equipo médico añade un ingeniero que da soporte a la operación controlando el módulo de guiado.
El quirófano queda dispuesto de la siguiente manera:
Ingeniero
Módulo
de guiado
Auxiliar
Anestesista
Pie de
cámara
Enfermera
Paciente
Médicos
cirujanos
ortopédicos
Enfermera
instrumentista
Brazo
robótico
Si el cirujano interviene en la otra
parte del cuerpo, el operativo
sería una imagen especular
FUENTE:
Manual de usuario del robot Mako

La cirugía de rodilla
y cadera asistida por un brazo robótico
Esta técnica lleva realizándose con éxito en el Hospital Clínico Universitario de Valladolid desde hace dos años.
El brazo robótico es una ayuda al cirujano que es quien realiza la intervención y toma decisiones antes y durante la operación.
El sistema está compuesto por tres módulos:
El brazo robótico
Permite controlar las manipulaciones, cortes e incisiones desde el mando ergonómico. La pistola del brazo interpreta los movimientos del cirujano y reduce al mínimo vibraciones.
La exactitud de las operaciones son submilimétricas.
Cabezal
para acoplar
los diferentes
utensilios para
realizar la operación
Pistola de
intervención
Brazo
articulado
Las articulaciones
del brazo hacen
que sea posible
llegar a todos
los lugares
que necesite
el cirujano
Base
del robot
con un freno
de pedal
Pie de cámara
Realiza un seguimiento de la posición de las herramientas de ayuda al cirujano. Avisa de movimientos no deseados en el miembro que está siendo intervenido.
Cámaras
de vídeo
Monitor para
el cirujano
que muestra
las imágenes
y está sincronizado
con el brazo
robótico
Pie móvil
Módulo de guiado
Es una estación de trabajo y coordina la recepción de la información de los diversos componentes. Este módulo lo controla un ingeniero.
Este monitor muestra
las imágenes
y está sincronizado
con el brazo
robótico
Consola de
control
Pie móvil
En el quirófano
El equipo médico añade un ingeniero que da soporte a la operación controlando el módulo de guiado.
El quirófano queda dispuesto
de la siguiente manera:
Ingeniero
Auxiliar
Módulo
de guiado
Anestesista
Pie de
cámara
Enfermera
Paciente
Médicos
cirujanos
ortopédicos
Enfermera
instrumentista
Brazo
robótico
Si el cirujano interviene en la otra
parte del cuerpo, el operativo
sería una imagen especular
FUENTE:
Manual de usuario del robot Mako

La cirugía de rodilla y cadera asistida por un brazo robótico
Esta técnica lleva realizándose con éxito en el Hospital Clínico Universitario de Valladolid desde hace dos años.
El brazo robótico es una ayuda al cirujano que es quien realiza la intervención y toma decisiones antes y durante la operación.
El sistema está compuesto por tres módulos:
El brazo robótico
Cabezal
para acoplar
los diferentes
utensilios para
realizar la operación
Permite controlar las manipulaciones, cortes e incisiones desde el mando ergonómico. La pistola del brazo interpreta los movimientos del cirujano y reduce al mínimo vibraciones.
La exactitud de las operaciones son submilimétricas.
Pistola de
intervención
Brazo
articulado
Las articulaciones
del brazo hacen
que sea posible
llegar a todos
los lugares
que necesite
el cirujano
Base
del robot
con un freno
de pedal
Pie de cámara
Realiza un seguimiento de la posición de las herramientas de ayuda al cirujano. Avisa de movimientos no deseados en el miembro que está siendo intervenido.
Cámaras
de vídeo
Monitor para
el cirujano
que muestra
las imágenes
y está sincronizado
con el brazo
robótico
Pie móvil
Módulo de guiado
Este monitor muestra
las imágenes
y está sincronizado
con el brazo
robótico
Es una estación de trabajo y coordina la recepción de la información de los diversos componentes. Este módulo lo controla un ingeniero.
Consola de
control
Pie móvil
En el quirófano
El equipo médico añade un ingeniero que da soporte a la operación controlando el módulo de guiado.
El quirófano queda dispuesto
de la siguiente manera:
Ingeniero
Auxiliar
Módulo
de guiado
Anestesista
Pie de
cámara
Enfermera
Paciente
Enfermera
instrumentista
Médicos
cirujanos
ortopédicos
Brazo
robótico
Si el cirujano interviene en la otra
parte del cuerpo, el operativo
sería una imagen especular
FUENTE:
Manual de usuario del robot Mako
La cirugía de rodilla y cadera asistida por un brazo robótico
Esta técnica lleva realizándose con éxito en el Hospital Clínico Universitario de Valladolid desde hace dos años.
El brazo robótico es una ayuda al cirujano que es quien realiza la intervención y toma decisiones antes y durante la operación.
El sistema está compuesto por tres módulos:
Pie de cámara
El brazo robótico
Módulo de guiado
Es una estación de trabajo y coordina la recepción de la información de los diversos componentes. Este módulo lo controla un ingeniero.
Realiza un seguimiento de la posición de las herramientas de ayuda al cirujano. Avisa de movimientos no deseados en el miembro que está siendo intervenido.
Permite controlar las manipulaciones, cortes e incisiones desde el mando ergonómico. La pistola del brazo interpreta los movimientos del cirujano y reduce al mínimo vibraciones.
La exactitud de las operaciones son submilimétricas.
Este monitor muestra
las imágenes
y está sincronizado
con el brazo
robótico
Cámaras
de vídeo
Monitor para
el cirujano
que muestra
las imágenes
y está sincronizado
con el brazo
robótico
Cabezal
para acoplar
los diferentes
utensilios para
realizar la operación
Consola de
control
Pistola de
intervención
Pie móvil
Pie móvil
Brazo
articulado
Las articulaciones
del brazo hacen
que sea posible
llegar a todos
los lugares
que necesite
el cirujano
Base
del robot
con un freno
de pedal
Ingeniero
En el quirófano
El equipo médico añade un ingeniero que da soporte a la operación controlando el módulo de guiado.
El quirófano queda dispuesto
de la siguiente manera:
Auxiliar
Módulo
de guiado
Anestesista
Pie de
cámara
Enfermera
Paciente
Enfermera
instrumentista
Médicos
cirujanos
ortopédicos
Brazo
robótico
Si el cirujano interviene en la otra
parte del cuerpo, el operativo
sería una imagen especular
FUENTE:
Manual de usuario del robot Mako
La experiencia que el Servicio de Cirugía Ortopédica y Traumatología del Hospital Clínico de Valladolid ha desarrollado en el uso de Mako hace que al centro lleguen profesionales de otros lugares para formarse en un avance tecnológico que permite una mayor precisión en cortes y al colocar las prótesis, lo que redunda en pacientes que salen del quirófano con mayor rango de movimiento y que requieren menos tiempo de rehabilitación, con un descenso del consumo de analgésicos.
Permite abordar con más garantías a los cirujanos los procesos más complicados, ha supuesto un ahorro en días de hospitalización, además de en el uso de sangre en las operaciones y de material que antes había que llevar al quirófano y esterilizar por si era necesario. Ahora, la planificación personalizada tridimensional hace posible concretar por anticipado lo que va a necesitar cada paciente.
Publicidad

Cristina Cándido y Leticia Aróstegui

Fernando Morales y Sara I. Belled
Francisco González
Esta funcionalidad es exclusiva para suscriptores.
Reporta un error en esta noticia



Comentar es una ventaja exclusiva para suscriptores
¿Ya eres suscriptor?
Inicia sesiónNecesitas ser suscriptor para poder votar.